当前,全球新一轮科技革命和产业变革方兴未艾,以人工智能、感知智能、大模型为代表的前沿技术持续涌现,具身智能产业开启生态化发展新阶段。其中,前沿科学技术、复杂系统集成与多元化应用场景交叉融合,正转化为新产品、新场景、新业态,形成大规模具身智能产业化应用,为发展新质生产力提供新动能。世界各国之间的竞争归根到底是科技实力竞争,主要体现在战略性新兴产业领域。近年来,具身智能技术加速演进,世界各国已敏锐地洞察到具身智能产业发展的巨大潜力,开始加速产业化布局,以抢占新兴领域的制高点。在头部企业的推动下,具身智能技术不断创新,应用场景日益广泛。特斯拉、华为、宇树科技等国内外多家知名企业均在具身智能领域积极布局,现已取得显著进展。 各国政府正抢抓新一轮具身智能发展机遇,从基础设施建设到应用生态培育,相继出台一系列政策举措,加速具身智能产业布局。2015年,日本在《机器人新战略》中重点布局护理机器人的开发和应用。2021年,欧盟发布《欧洲地平线计划(2021-2027年)》,支持开发认知能力和交互能力更强的具身智能技术。2022年,美国国防部发布的《负责任的人工智能战略和实施路径》着重强调了具身智能在军事领域的潜在价值。2023年,美国更新《国家人工智能研发战略计划》,重点聚焦机器人、人工智能等具身智能体关键环节,关注人工智能交互和协作的新范式。2024年1月,韩国产业通商资源部公布《第四个智能机器人基本计划(2024-2028年)》,提出“K-Robot经济”概念,计划到2030年,重点攻克传感器等5项硬件技术和自主运动等3项软件技术。与此同时,具身智能产业发展引起我国的高度重视。《“十四五”机器人产业发展规划》《“机器人+”应用行动实施方案》等政策文件明确了机器人产业的发展方向,聚焦智能机器人与AI技术融合,推动具身智能在民生、养老、应急救援等关键领域实现应用突破。2025年3月,我国首次将“具身智能”写入中央政府工作报告。此后,各地政府对具身智能产业的关注不断增强。如通过部省协同推进国家人工智能创新应用先导区建设,央地共建具身智能机器人、人形机器人等。 学术界对具身智能技术融合及产业应用场景进行了探讨,但对具身智能产业发展的生成逻辑及协同赋能机理研究不足。例如,Fan等的研究表明,大语言模型智能体在工业机器人中具有变革潜力,重点体现在工业制造中的自主设计、决策和任务执行等环节[1]。Du等聚焦具身智能技术视角,全面系统地梳理了多传感器数据融合场景感知技术的研究进展与应用场景[2]。现有文献并没有从产业生态视角深入系统地对具身智能产业发展机理进行研究,没有揭示为何2022年以来具身智能产业呈爆发式增长。基于此,本文试图回答以下问题:具身智能产业的内涵与特征是什么?具身智能产业发展机理是什么?我国如何抢占制高点,推进策略又是什么?对上述问题的解答,不仅有助于深刻理解具身智能产业发展的内在逻辑,而且可为引导具身智能产业做强做优做大、发挥其在科技革命中的战略引领作用提供理论支撑和实践参考。 一、具身智能产业的内涵特征 具身智能产业是新一轮科技革命的增长引擎,其内涵具有多维复杂性。它突破了单一技术和产业的范畴,代表智能产业链协同与融合的深层次变革。一方面,具身智能技术由模块化的AI算法集成转向大模型驱动的复合式技术框架,具有通用性和泛化的特点。另一方面,具身智能产业不再局限于高精尖工业应用,而是向消费市场普及,实现多功能、多场景、跨领域协作。当前,学术界还没有对具身智能产业的发展阶段进行梳理,对其内涵和特征仍未达成共识。这里先梳理具身智能产业的发展阶段,明确具身智能产业的内涵与边界。在此基础上,进一步分析具身智能产业的“技术—经济”特征,为后文探讨具身智能产业的发展机理奠定基础。 (一)具身智能产业的发展历程及其阶段性特征 具身智能产业由单一技术驱动逐渐发展为多技术融合驱动、产业链协同创新、多场景跨领域赋能的产业体系。从发展历程来看,具身智能产业发展历程大致可分为三个主要阶段(见表1),分别为起步发展阶段(1945-1990年)、深入发展阶段(1991-2021年)、全面融合阶段(2022年至今)。
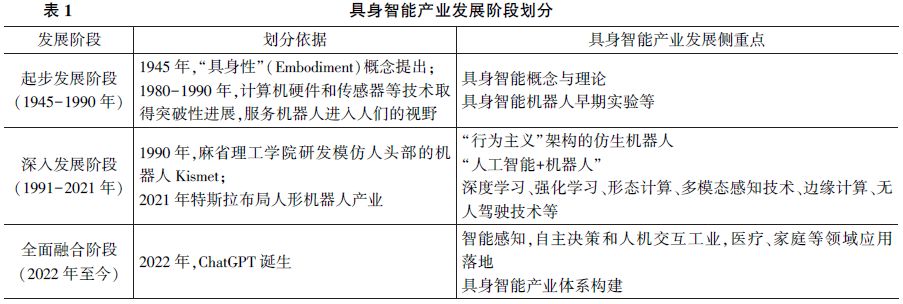
1.起步发展阶段(1945-1990年):概念提出与初步探索 具身理论的哲学根源可以追溯到现象学。1945年,法国哲学家梅洛-庞蒂提出“具身性”(Embodiment)的概念[3],强调身体是认知与环境的媒介,其思想为后续具身智能理论研究奠定了基础。1950年,图灵在其论文集“Computing Machinery and Intelligence”中首次提出具身智能的概念,即机器能够像人类一样感知环境、推理决策并付诸行动[4]。20世纪80年代末,美国机器制造师罗德尼·布鲁克斯(Rodney Brooks)提出“行为主义人工智能”理论,开始关注通过感知和动作驱动的环境交互设计智能机器。基于此,行为主义人工智能技术逐步发展,将身体与环境交互的理念进一步深化。在实践应用中,智能机器人进行了早期的实验性尝试,探索通过“逻辑规则算法+移动对话+机器人”的交互以实现特定应用功能。如1954年麻省理工学院生产第一台能够预先编程控制的机械臂,具备了机器人的雏形。1960年,美国通用汽车公司首台工业机器人Unimate投入使用。1973年,日本早稻田大学研发了对话人形机器人WABOT-1。随着计算机硬件、传感器等技术的突破,机器人技术开始在服务领域广泛应用,如1985年日本公司Epson推出了第一款家庭机器人“AIBO”。