云南省图书馆机构用户,欢迎您!
随着工业自动化和物流技术的发展,不少企业开始致力于物流配送系统的自动化改造。在介绍机器视觉技术和物流配送自动化系统的基础上,结合用于实践教学的物流配送自动化仿真系统,讨论了机器视觉在物流配送领域的应用,并详细分析了基于机器视觉的物料形状识别系统、尺寸检测系统和条形码识别系统的硬件和软件结构、功能及原理等。
 图1 机器视觉系统构成 1.2 工作原理 可以认为,一个机器视觉系统的工作过程就是一个能自动获取一副或多副目标物体图像,对所获取图像的各种特征量进行处理、分析和测量,并对测量结果做出定性分析和定量解释,从而得到有关目标物体的某种认识并做出相应决策的过程[1]。具体来说,图像传感器将摄取目标转换成模拟的视频信号并传送给图像采集系统,由该系统做模数转换和其它预处理后得到数字图像信号,然后由计算机和专用图像处理系统对这些信号进行显示和各种处理,最后根据预设的容许值和其它条件输出结果,计算机根据检测结果控制运动系统或执行相应的控制动作。 2 在物流配送自动化仿真系统中的应用 物流配送自动化仿真系统结构图如图2所示。 该系统主要模拟现代工业中典型的物流配送系统,以物流配送过程中普遍使用的各种传送带作为连接,集成现代物流配送应用中典型的功能模块,包括堆垛仓及其智能管理系统、产品识别和追踪如条形码识别、产品在线检测如形状识别、尺寸检测,以此进行物料自动拣选[2]。总控系统主要由三部分硬件组成:工业总线Profibus主站(其他工位各有一个Profibus从站)、传送带PLC和工控机(各工位上的工控机通过工业以太网与总监控器连接),以及相应的继电器等电路部分。总控系统通过工业以太网与Profibus-DP现场总线实现系统监控,完成各工位的网络连接、指令和信息的传递、系统作业的协调控制、物料数据的管理。 在系统的各个物料检测与识别工位设计中主要用到了机器视觉技术,下面分别介绍机器视觉在系统各工位中的应用。 2.1 在条形码识别工位的应用
图1 机器视觉系统构成 1.2 工作原理 可以认为,一个机器视觉系统的工作过程就是一个能自动获取一副或多副目标物体图像,对所获取图像的各种特征量进行处理、分析和测量,并对测量结果做出定性分析和定量解释,从而得到有关目标物体的某种认识并做出相应决策的过程[1]。具体来说,图像传感器将摄取目标转换成模拟的视频信号并传送给图像采集系统,由该系统做模数转换和其它预处理后得到数字图像信号,然后由计算机和专用图像处理系统对这些信号进行显示和各种处理,最后根据预设的容许值和其它条件输出结果,计算机根据检测结果控制运动系统或执行相应的控制动作。 2 在物流配送自动化仿真系统中的应用 物流配送自动化仿真系统结构图如图2所示。 该系统主要模拟现代工业中典型的物流配送系统,以物流配送过程中普遍使用的各种传送带作为连接,集成现代物流配送应用中典型的功能模块,包括堆垛仓及其智能管理系统、产品识别和追踪如条形码识别、产品在线检测如形状识别、尺寸检测,以此进行物料自动拣选[2]。总控系统主要由三部分硬件组成:工业总线Profibus主站(其他工位各有一个Profibus从站)、传送带PLC和工控机(各工位上的工控机通过工业以太网与总监控器连接),以及相应的继电器等电路部分。总控系统通过工业以太网与Profibus-DP现场总线实现系统监控,完成各工位的网络连接、指令和信息的传递、系统作业的协调控制、物料数据的管理。 在系统的各个物料检测与识别工位设计中主要用到了机器视觉技术,下面分别介绍机器视觉在系统各工位中的应用。 2.1 在条形码识别工位的应用 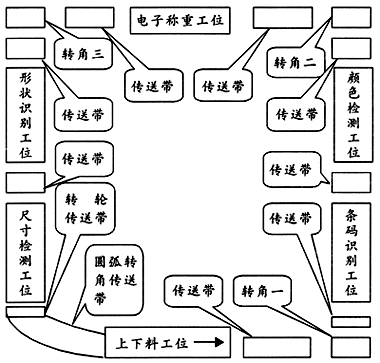 图2 物流配送自动化仿真系统结构图 对于物流传送带或生产流水线上的物料条码识别,传统的扫描器识别方法受条码印刷技术、印制材料以及条码本身的运动速度和角度的影响,识别率较低。基于机器视觉的条形码自动识别技术是利用高速CCD摄像机直接得到被测物料条形码的图像,然后送入计算机进行图像预处理,再通过条码读取、译码和校验来完成条码识别[3]。根据该物流配送仿真系统的物料所用条形码类别(EAN-13),物料模型情况(如尺寸、大小等),传送带速度,工作现场环境和本工位拟安装的位置和方式,确定了以下硬件和软件解决方案。 2.1.1 硬件结构与选型 系统硬件由一台工控机、摄像头、光源、图像采集卡和物料传送装置等组成。其结构图如图3所示。
图2 物流配送自动化仿真系统结构图 对于物流传送带或生产流水线上的物料条码识别,传统的扫描器识别方法受条码印刷技术、印制材料以及条码本身的运动速度和角度的影响,识别率较低。基于机器视觉的条形码自动识别技术是利用高速CCD摄像机直接得到被测物料条形码的图像,然后送入计算机进行图像预处理,再通过条码读取、译码和校验来完成条码识别[3]。根据该物流配送仿真系统的物料所用条形码类别(EAN-13),物料模型情况(如尺寸、大小等),传送带速度,工作现场环境和本工位拟安装的位置和方式,确定了以下硬件和软件解决方案。 2.1.1 硬件结构与选型 系统硬件由一台工控机、摄像头、光源、图像采集卡和物料传送装置等组成。其结构图如图3所示。 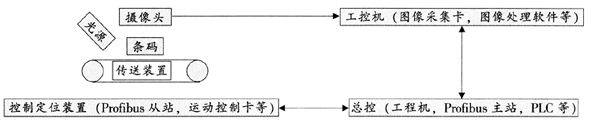 图3 条码识别工位硬件结构图 硬件选型: 工控机:研华IPC-610L(内存:256M,CPU:PⅢ1.8G,); 镜头:Kowa LM16JC,焦距16mm; CCD摄像头:美国Uniq UM-201,1/2英寸,像素768×494; 图像采集卡:大恒图像卡DH-CG400; 光源:LED,波长630nm。 2.1.2 软件工作过程及功能
图3 条码识别工位硬件结构图 硬件选型: 工控机:研华IPC-610L(内存:256M,CPU:PⅢ1.8G,); 镜头:Kowa LM16JC,焦距16mm; CCD摄像头:美国Uniq UM-201,1/2英寸,像素768×494; 图像采集卡:大恒图像卡DH-CG400; 光源:LED,波长630nm。 2.1.2 软件工作过程及功能  图4 条码识别软件流程图 在已有的硬件基础上,通过软件设计(软件工作过程如图4所示)完成以下工作:条码图像的采集,接着在图像预处理环节进行图像的几何校正、二值化处理和中值滤波去噪,定位条码然后根据条码编码特征进行条码的识读,并采用相似边距离测量法完成译码。采用相似边之间距离译码的优点是,即使条码符号的印刷存在缺陷或扫描不够均匀,使得实际测量值与理论值间有较大的偏差,仍然可以根据相似边距离正确的解释。
图4 条码识别软件流程图 在已有的硬件基础上,通过软件设计(软件工作过程如图4所示)完成以下工作:条码图像的采集,接着在图像预处理环节进行图像的几何校正、二值化处理和中值滤波去噪,定位条码然后根据条码编码特征进行条码的识读,并采用相似边距离测量法完成译码。采用相似边之间距离译码的优点是,即使条码符号的印刷存在缺陷或扫描不够均匀,使得实际测量值与理论值间有较大的偏差,仍然可以根据相似边距离正确的解释。