原昆明卷烟厂物流系统是于1997年承建的,包含15台AGV(芬兰ROCLA公司制造)、4台堆垛机、3台穿梭车及货架、输送机等设备,应用于生产四部。由于存在AGV导航丢失严重、路径变更困难、电控总线掉线、服务响应慢等问题,昆烟决定于2004年底由昆明船舶设备集团有限公司进行整个系统改造。其中,AGV系统的改造是整个系统改造中的重要一环,改造原则是完全延用原AGV 单机及系统的硬件和设备,以软件更新为重点,进行AGV的程序编制和修改,建立新的导航系统, 重作路径规划,最终实现能够完全自主维护和变更调整。 改造前AGV系统调研 1.系统配置 整个系统采用瑞典NDC激光导引7系统平台,项目应用分布在二、三层楼。 二楼为硬包卷烟区,分配有9台AGV,共10台卷烟机组,4台滤嘴棒成型机组,每个卷烟机组集中了装封箱机、机器人成品码垛。AGV除了运送卷烟辅料、 丝束包外,还需运送成品烟箱、成品托盘及废烟、废料箱。 三楼为软包卷烟区,分配有6台AGV,共15台卷烟机组,4台滤嘴棒成型机组。AGV运送卷烟辅料,丝束包及废烟、废料箱。 地面站主控器是NT7000,监控系统为CWAY7, 在辖区内控制整个系统中小车的交通管理、作业管理和车辆调度。上与生产调度计算机联系,接受装卸货需求指令,下与车辆保持通讯,监控系统状态,并下达工作命令。 系统配置如图1所示。 2.基础数据和主要特性 AGV基本参数及性能指标见表1、表2。 AGV的蓄电池使用了8年,性能良好。充电时由每个当班人员在AGV 监控计算机上分批下达充电命令。以二楼为例,早班下达1、2、3号AGV充电,中班下达4、5、6号AGV充电,晚班下达7、8、9号AGV充电(此时电池容量消耗为60%左右)。接收到充电命令的AGV自动前往充电站,充电完成能自动脱离,重新投入工作。 未安排充电的AGV继续工作。 当值班人员忘记下达充电命令,电池容量消耗到一定值时(一般为80 %),AGV会自动提示请求充电。 充电任务优先级比较高,但如果此时是在执行工作任务之中,则先完成工作任务,再执行充电。 (1)系统通讯 AGV控制计算机上安装有1块PCCOM卡,是NDC专为小车通讯开发的通讯卡,提供4个串口。其中,串口1、2使用RS423协议,连接无线电通讯器,串口3使用RS485协议,连接信号采集器。 主控器NT7000与AGV之间采用SatelLine-2AS无线电通讯,通讯速率为9600Kbps。二、三楼AGV分置不同频率,以避免干扰。对频率设置不同的通讯区域,以获得最大的流畅性。 NT7000与生产调度系统之间采用TCP/IP协议通讯,生产调度系统需安装开发的接口控件。 NT7000与AGV图形监控之间采用TCP/IP协议通讯。
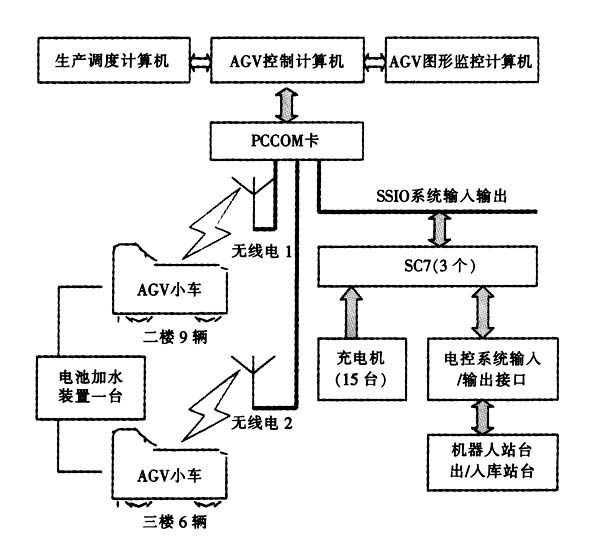
图1 系统配置图 表1 AGV基本参数及性能指标

表2 电池与充电

(2)信号采集 系统中由于有大量的I/O设备需要连接,所以配备了3个SC7信号采集器。SC7有32个I/O点,其中16个输入,8个输出,8个可选择为输入输出。一个SC7用于连接15台充电机,其余的用于连接机器人站台和出入库站台。 SC7与充电机之间为单向连接,只采集充电机的充电状态信号。 SC7与机器人之间为双向连接,有握手信号(机器人有安全光栅,防止工作时人员进入,站台有高速机组机器人码垛需要的空托盘组和码好的成品烟箱托盘)。AGV进入机器人工作区域进行装货或卸货时的工作流程如图3所示。

图2 AGV在出/入库站台进行装货

图3 AGV与机器人握手信号 (3)运行模式 运行模式分为工作模式和关机模式。 在工作模式时,AGV散开于车间,便于就近工作,提高效率。 在关机模式时,AGV全部返回各自的充电站进行充电,便于AGV再开机工作时电池容量恢复。 (4)导航性能 经过多年的使用,导航性能出现下降,时有丢失导航的情况发生,究其原因,主要有以下几点: 机组挪动,反射板位置发生偏移; 转弯段AGV行走速度过快,有些甚至是100%的最大速度,对导航和安全都不利;