云南省图书馆机构用户,欢迎您!
智能车辆具有感知、推理与执行功能,能够在复杂的交通环境中进行自主决策,从而提升行驶安全性和交通效率。本文综述了智能车辆在途运行行为的语义建模与表达方法的研究进展,重点分析了智能车辆在途运行行为的语义认知、表达和推理的各类技术方法,帮助智能车辆理解交通规则、预测交通参与者的行为并做出安全决策。在此基础上,本文讨论了智能车辆在途运行行为语义建模的多模态数据融合、语义认知的知识与数据双驱动、语义表达的标准化与动态适应、语义推理的不确定性处理和实时决策等关键技术的发展趋势,为智能车辆在途运行行为建模与推理的未来研究提供了理论依据与实践指导。
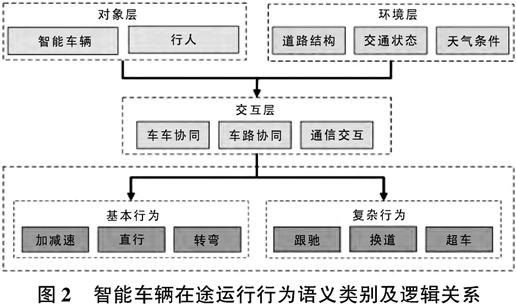
 1 智能车辆在途运行行为语义建模 1.1 语义内涵及建模框架 智能车辆运行过程包含丰富的语义信息,这些信息在环境感知、行为决策和通信等方面发挥着重要的作用。具体而言,智能车辆通过传感器(如摄像头、雷达等)感知道路交通环境,并结合地图、场景上下文等信息,理解复杂场景中的动态元素及其语义,从而准确预测其他道路使用者的行为,做出精确的决策,提升交通系统的协同感知能力和整体运行效率。 语义建模是一个组织知识的过程,这些知识可以用于查询和可视化多个决策任务[7]。智能车辆在途运行行为语义建模需考虑其在行驶过程中所涉及的不同层面的关联因素。①对象层:表示智能车辆及其与环境中的其他物理或抽象实体,例如,智能车辆、行人、交通信号灯、道路标识等。②车辆状态层:描述智能车辆的当前状态信息,可以通过动态数据进行描述,例如,车辆的实时位置、行驶速度、加速度、行驶方向等。③行为层:描述智能车辆不同层级的运行行为,例如,加减速、转弯、直行等基本行为,变道、超车等复杂行为。④环境层:智能车辆的行为通常受环境因素影响,该层次将智能车辆与其所处的环境和上下文进行关联,例如,车道、十字路口等道路结构,交通拥堵、交通事故等交通状态,雨雪等天气条件等。⑤交互层:描述智能车辆之间以及智能车辆与道路基础设施、其他交通参与者等的交互关系,例如,车辆之间共享的相对位置、速度、方向等信息及协同行为,车辆与交通信号灯通信交互等。⑥决策层:描述智能车辆的行为决策,包括车辆基于当前道路状况、交通流量、信号灯状态等信息做出的行驶路径规划和实时避障决策。 智能车辆在途运行行为各层级语义类别、各类别的部分实体以及逻辑关系如图2所示。智能车辆是对象层的中心实体,交互层反映其与环境层中的其他实体、交通环境等的动态关系,并依此产生行为层中的运行动作。在实际建模过程中,还需要涉及到驾驶员与智能车辆系统的交互,通过雷达、定位系统等多种传感器数据产生的多源数据融合等构建更完善的语义模型,用以解决智能车辆运行行为不同维度的语义认知问题。
1 智能车辆在途运行行为语义建模 1.1 语义内涵及建模框架 智能车辆运行过程包含丰富的语义信息,这些信息在环境感知、行为决策和通信等方面发挥着重要的作用。具体而言,智能车辆通过传感器(如摄像头、雷达等)感知道路交通环境,并结合地图、场景上下文等信息,理解复杂场景中的动态元素及其语义,从而准确预测其他道路使用者的行为,做出精确的决策,提升交通系统的协同感知能力和整体运行效率。 语义建模是一个组织知识的过程,这些知识可以用于查询和可视化多个决策任务[7]。智能车辆在途运行行为语义建模需考虑其在行驶过程中所涉及的不同层面的关联因素。①对象层:表示智能车辆及其与环境中的其他物理或抽象实体,例如,智能车辆、行人、交通信号灯、道路标识等。②车辆状态层:描述智能车辆的当前状态信息,可以通过动态数据进行描述,例如,车辆的实时位置、行驶速度、加速度、行驶方向等。③行为层:描述智能车辆不同层级的运行行为,例如,加减速、转弯、直行等基本行为,变道、超车等复杂行为。④环境层:智能车辆的行为通常受环境因素影响,该层次将智能车辆与其所处的环境和上下文进行关联,例如,车道、十字路口等道路结构,交通拥堵、交通事故等交通状态,雨雪等天气条件等。⑤交互层:描述智能车辆之间以及智能车辆与道路基础设施、其他交通参与者等的交互关系,例如,车辆之间共享的相对位置、速度、方向等信息及协同行为,车辆与交通信号灯通信交互等。⑥决策层:描述智能车辆的行为决策,包括车辆基于当前道路状况、交通流量、信号灯状态等信息做出的行驶路径规划和实时避障决策。 智能车辆在途运行行为各层级语义类别、各类别的部分实体以及逻辑关系如图2所示。智能车辆是对象层的中心实体,交互层反映其与环境层中的其他实体、交通环境等的动态关系,并依此产生行为层中的运行动作。在实际建模过程中,还需要涉及到驾驶员与智能车辆系统的交互,通过雷达、定位系统等多种传感器数据产生的多源数据融合等构建更完善的语义模型,用以解决智能车辆运行行为不同维度的语义认知问题。